A Biomimetic jellyfish inspired soft robot
| Overview & Contributions |
For this project, we needed to take inspiration from something in nature. From this inspiration,
we needed to design and build a robot in order to conduct experiments to test our hypothesis. I took
inspiration from jellyfish and convinced other students to join me in creating a bio-inspired jellyfish
robot.
My roles on this project were:
More details about the project are below as well as a link to the Github repository. |
| Hypothesis | A jellyfish-inspired robot, compared to current robots, will enable less obtrusive ocean observation |
| Introduction | Typically researchers use robotic underwater vehicles to track and study aquatic life. These robots are robust to incident currents underwater, but the wake from their propellers may disrupt the ecosystem the robot intends to study. To make aquatic environmental monitoring systems less obtrusive, we propose using a jellyfish-inspired robot to study marine life. We hypothesize that the wake from jellyfish-inspired robots will be less turbulent and therefore reduce the disturbance to the ecosystem. To do this, we will use an electromagnet-driven propulsion system that will theoretically be much quieter than motor-driven systems. Once our prototype is complete, we’ll be able to directly compare the noise and vibrations created by our system and by typical motor and propeller-driven systems. |
| Design |
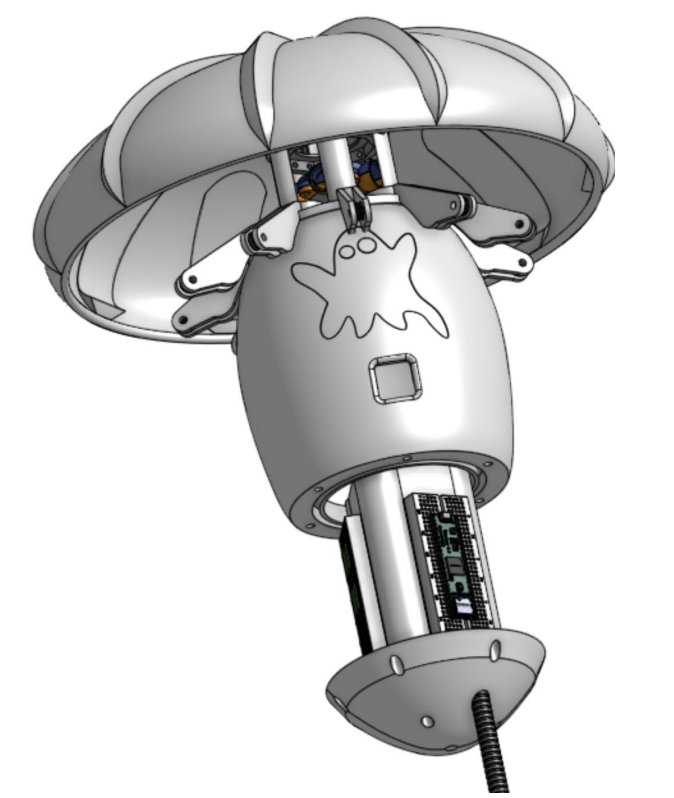
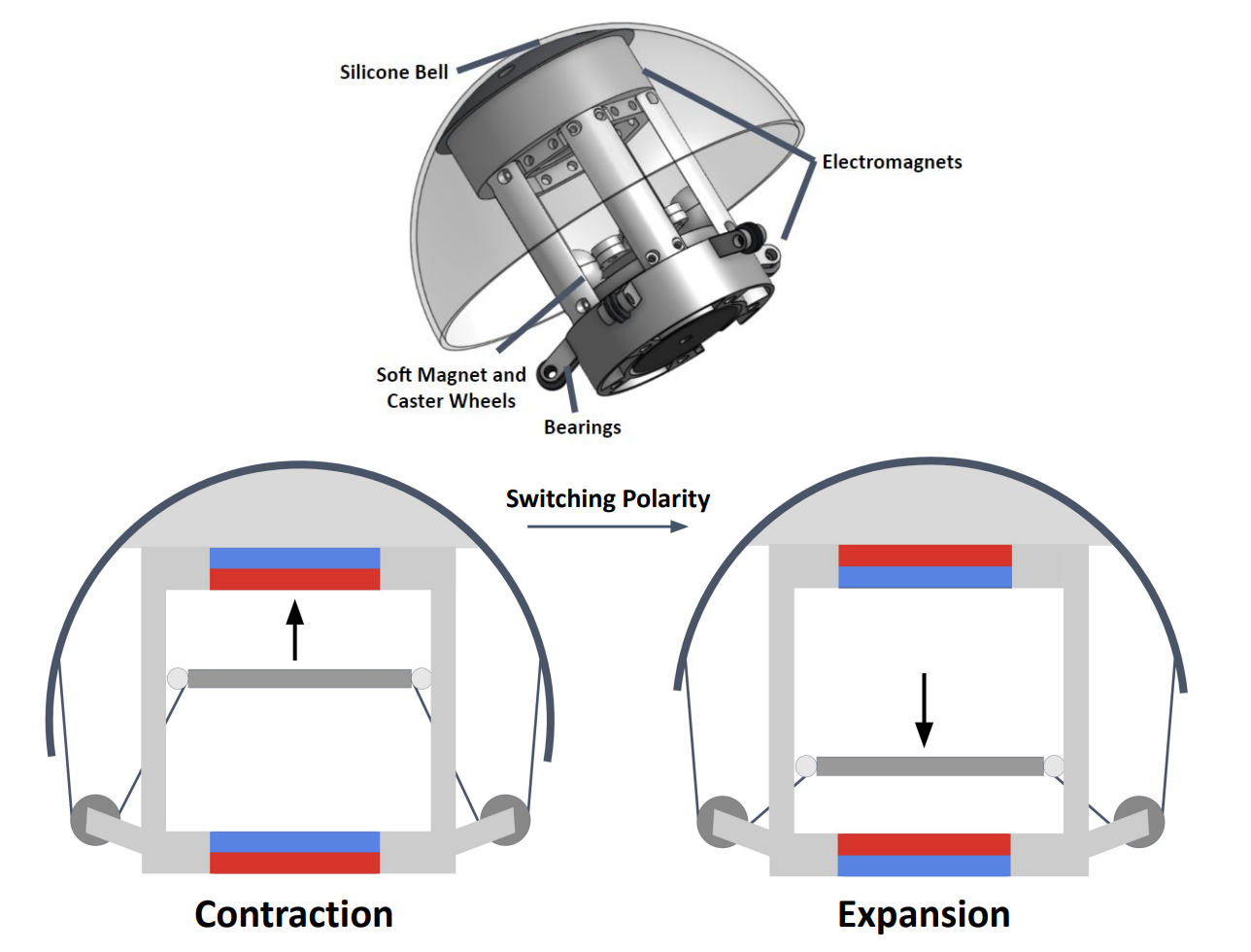
Our actuation design includes two electromagnets, a soft permanent magnet, and a rail system for the soft
to travel on. The two electromagnets alternately repel and attract the “soft magnet” which actuates the
bell and increases the force of propulsion. The soft magnet is attached to the bell via a pulley sysem which
contracts and expands the bell.
The bell was designed over three iterations. The first bell had a uniform shape, this bell did not deform in the way we wished. To combat this, our second bell design featured uniform sized spines starting from the crown and continued to the end of the bell. This design had too much unnecessary weight. Our third and final design had the same spine design, but we tapered them as they moved down the bell. 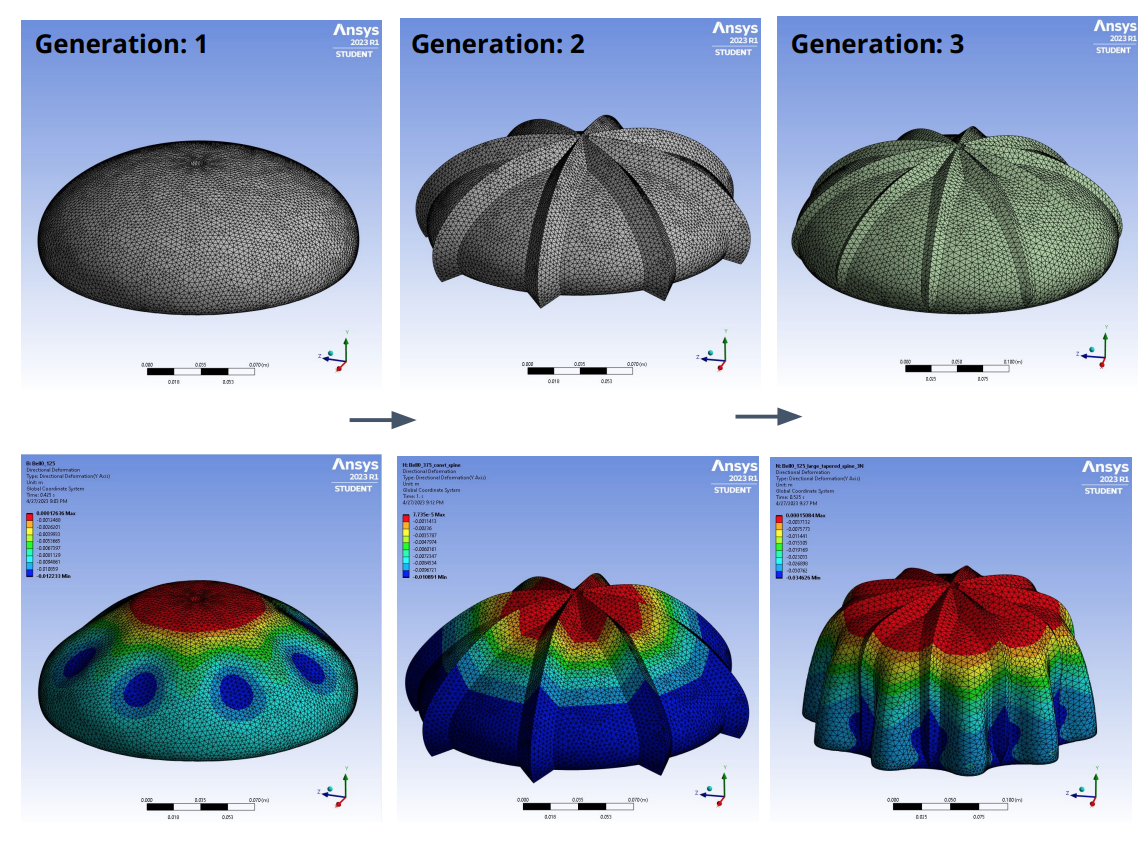
|
| Experiments |
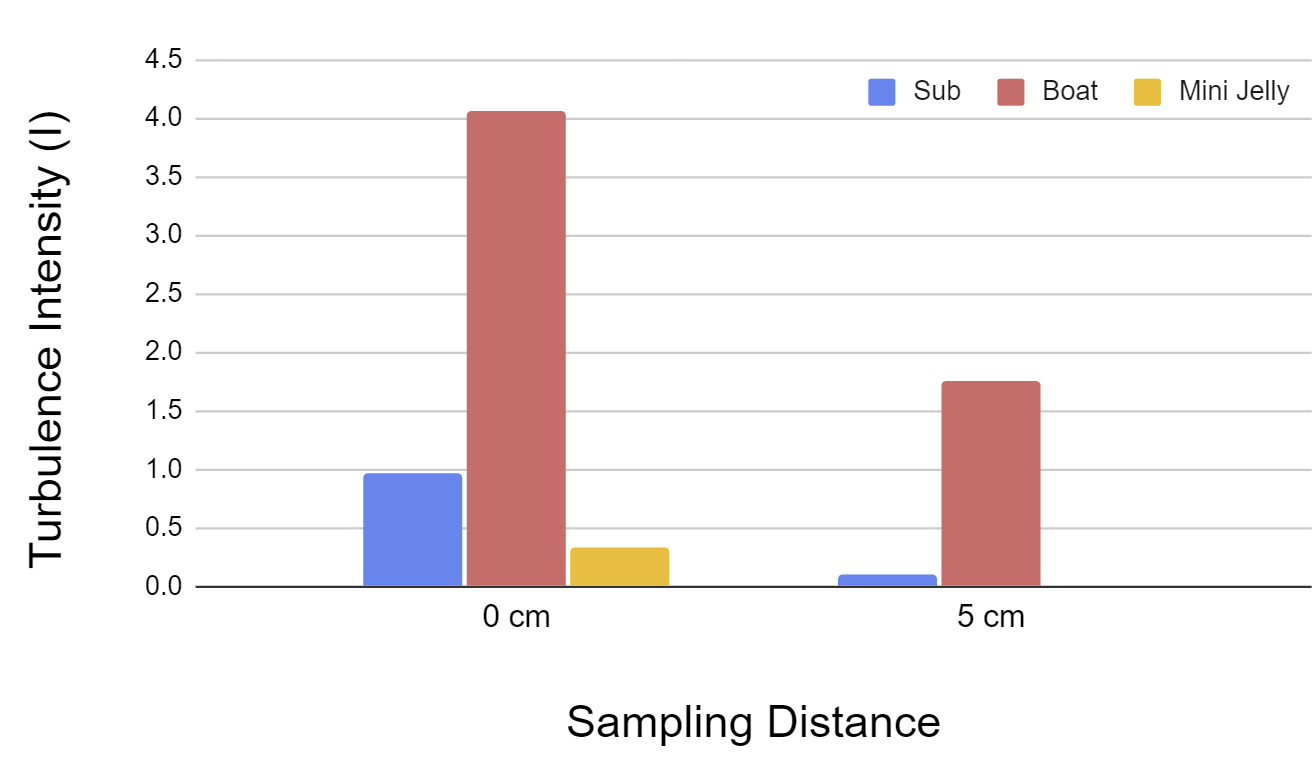
The goal of our robot is to minimize the turbulence created by our actuation as compared to common underwater
propolsion systems. To test this hypothesis we compared the turbulence created by a RC submarine, a RC boat, and
a similarly scaled version of out jellyfish robot. To measure the turbulence we used a whisker-inspired sensor
designed and manufactured by Tuo Wang measured the water velocity.
Videos of the tests are below: 
|
| Conclusions |
From our experiment, the initial results are extremely promising. As shown on the graph above, our prototype jellyfish
robot clearly caused the least turbulence of all tested. However, these initial findings are not enough to draw a clear
conclusion. More tests would need to be conducted to prove our hypothesis. Additionally, a cost analysis would need to
be conducted to prove this actuation method as a viable replacement for underwater robotic propulsion. As shown below, the
velocity of the robot is minimal but less turbulent.
|
| Repository Link | Here are links to the project's repository and a brief video of the project. |